



.jpg)

9、将A、B点坐标,α、β、α1、β1分别填入表格中,根据前方交会法原理和计算方法,进行内业计算,得到P和P1点坐标值,计算两点的坐标差值,得到P点的水平位移偏移量. 10 模拟第一次水平位移观测计算成果表 模拟第二次水平位移观测计算成果表


已知条件A、B两点坐标分别为(xA,yA)、(xB,yB),求p点的坐标. 待求数据p点的坐标(Xp,Yp) 观测数据 为确定P点的位置,经纬仪分别安置A、B两点,用测回法观测∠A、∠B 坐标计算 根据A、B两点的坐标和∠A、∠B,P点坐标为
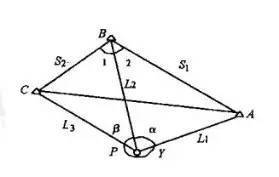
前方交会法和后方交会法 前方交会:在己知的两个(或两个以上)己知点(A,B)上架站通过测量α角和β角,计算待测点(P)坐标的方法.如下图所示,红色字母代表的站点为架站点(A,B): 后方交会法:在待测点(P)上架站,通过使用三个己知点(A,B,C)

是一种经常采用的加密控制点的方法.常用的几种方法有:前方交会、侧方交会、后方交会.

.可用三角形Ⅰ、Ⅱ分两组解算P点的坐标.下 面仅以Ⅰ组三角形(图6.22)为例,介绍P点坐标的计算方法.


6、三角测定 即后方交会、磁方位角交会、前方交会等方法.后方交会、磁方位角交会等方法参见第54页的叙述.前方交会法则是后方交会法的\"反转\":依靠图上与现地都有的1-3个已知点,分别向前方测出各自的目标方向线,交会出待测点.如图9-7所示:图中A为已知点在现

可用角度前方交会法测量,如图11-2,在烟囱附近布设基线AB,分别安置经纬仪于A、B两点,测定顶部P′ 两侧切线与基线的夹角,取其平均值,即可得图中之a ,利用前方交会公式(10-4)可计算出P′ 的坐标,同法可得P点的坐标,则P′与P两点间的平距

二、代码实现 距离前方交会.java package text;import java.awt.*;import java.awt.event.*;import java.math.*;import javax.swing.*;import jav

,且不应大于 .以上结论对制定变形观测方案有较大的帮助. 图10-6 测角交会法误差椭圆 (3)交会基准线丈量精度的影响 是含有误差 的交会基线. 为正确的位移值, 为在误差

frame.setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE); frame.setVisible(true); }

3应用说明 (1)为了提高交会点的精度,通常观测类似于前方交会法的两组三角形,即加测与另一已知点相连的一条边;也可在观测两条边的基础上,再加测一个或两个角度,通过边长反算的角度是否比观测的角小于某一限值进行检核,这种方法通常称边角三角形法. 某测边


3、侧方交会 4、自由设站法 交会法步骤: 1、选点:室内选点、野外踏勘 2、打桩或埋石观测:水平角的观测 1、前方交会 已知点A、B上测出α和β,计算待定点P的坐标.为了提高精度,交会角最好在90°左右,一般不小于30°或大于12
网友:黄绩讳:“嗯,我准备闭关了,不成四重天界神,不出关。
网友:戴贝:一根根木头从地面之下伸出,把药师兜束缚了起来,代替了佐井的水墨章鱼触手,而药师兜则是不再多说什么,任由束缚坐在了地面上。
网友:钱郢晋:宇智波带土缓缓的走到了另外一个房间之中,他看着房间里面的三个人,尤其是坐在椅子上的那个老者,突然对其说道:“这一次我们的配合很好,我想只需要等待一段时间,宇智波佐助便会代替宇智波鼬成为我们晓的一员,那个时候无论是对于木叶,还是莲川木汐都会给他们带来巨大的危机,只是我有一点很奇怪,一向以木叶利益为优先的你,什么时候开始竟然与我们这样的组织联合起来了,木叶的志村团藏!”
网友:张麾明:苏河眉头微皱,此刻他再次面临了选择,要么进入正传送阵,要么进入反传送阵。
网友:程富:屋子里只剩阿婉一人躺在床上。
网友:孙遂谓: “好啊。
网友:胡滨赦: “我要回家!”
网友:杨爹问:可因为距离明显变的更远。